Media Summary: Authors: Ho Jin Choi, Satyajeet Das, Shaoting Peng, Ruzena Bajcsy and Nadia Figueroa Abstract: This paper investigates the ... The paper presents a shared control architecture for robotic systems commanded through a Robotic Management System (ICRA 2024) with EMSD
Icra 2024 Eeg Based Motor - Detailed Analysis & Overview
Authors: Ho Jin Choi, Satyajeet Das, Shaoting Peng, Ruzena Bajcsy and Nadia Figueroa Abstract: This paper investigates the ... The paper presents a shared control architecture for robotic systems commanded through a Robotic Management System (ICRA 2024) with EMSD Real-Time Monitoring and Prediction of Environmental Motion for Enhancing Safety in Robot-Assisted Microsurgery. Paper link: Paper citation: Ravi Pandya, Zhuoyuan Wang, Yorie Nakahira and Changliu Liu, ... AGRNav: Efficient and Energy-Saving Autonomous Navigation for Air-Ground Robots in Occlusion-Prone Environments.
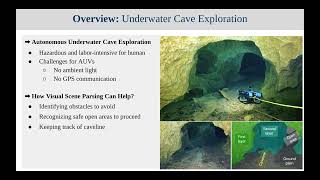
Project page: robopi.ece.ufl.edu/caveseg.html A. Abdullah, T. Barua, Z. Chen, R. Tibbetts, M. J. Islam, and I. Rekleitis. CaveSeg: ...
![[ICRA 2024] EEG-based Motor Intention Detection for Real-Time Robot Assistive Control](https://i.ytimg.com/vi/PWn2LCZLi9I/mqdefault.jpg)






![[ICRA 2024] Towards Proactive Safe HRC via Data-Efficient Conditional Behavior Prediction](https://i.ytimg.com/vi/ZHdKIheTBak/mqdefault.jpg)
![[ICRA 2024] Aerial Tensile Perching and Disentangling Mechanism](https://i.ytimg.com/vi/xwRNbuq0uH4/mqdefault.jpg)


![[ICRA 2024] AGRNav](https://i.ytimg.com/vi/toK7dWnnjsM/mqdefault.jpg)