Media Summary: Video associated with our IEEE RA-L paper: Lingyu Ma, Soon-Jo Chung, and Seth Hutchinson, " Junho Yang, Ashwin Dani, Soon-Jo Chung, and Seth Hutchinson, "
Monompc Monocular Vision Based Navigation - Detailed Analysis & Overview
Video associated with our IEEE RA-L paper: Lingyu Ma, Soon-Jo Chung, and Seth Hutchinson, " Junho Yang, Ashwin Dani, Soon-Jo Chung, and Seth Hutchinson, " J. Yang, D. Rao, S.-J. Chung, and S. Hutchinson, " Inkyu Sa, Hu He, Van Huynh and Peter Corke, " This is the supplementary video material for IROS2021.
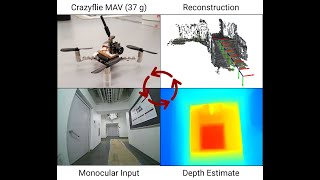
Find out more information about this project and links to download the report at, Diego Mercado Pedro Castillo Rogelio Lozano UTC 2015. This is a research preview of the MonoNav system, which enables micro aerial vehicles, or MAVs, to fly in previously unseen ... Project form the Intelligent Robotics Lab at the University of Illinois at Urbana Champaign. Arun Lakshmanan, Mitchel Jones and ...