Media Summary: This video shows the fundamental features of RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Theta* for geometric path planning. ORCA for path following with collision avoidance. Ad-hoc deadlock detection mechanism.
Mapf Simulator 1 0 Multi - Detailed Analysis & Overview
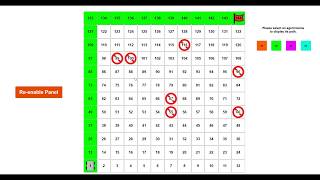
This video shows the fundamental features of RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Theta* for geometric path planning. ORCA for path following with collision avoidance. Ad-hoc deadlock detection mechanism. Final Project Presentation RBE550: Motion Planning In this Course, I will take you from the very basics of This is a demonstration of plan execution for
This talk aims to invite you to the forefront of In this video, we discuss what we mean by Classical The project is available at GitHub: It uses Decoupled Coordination Technique and a ... J. Kottinger, S. Almagor, and M. Lahijanian, “Conflict-Based Search for Explainable